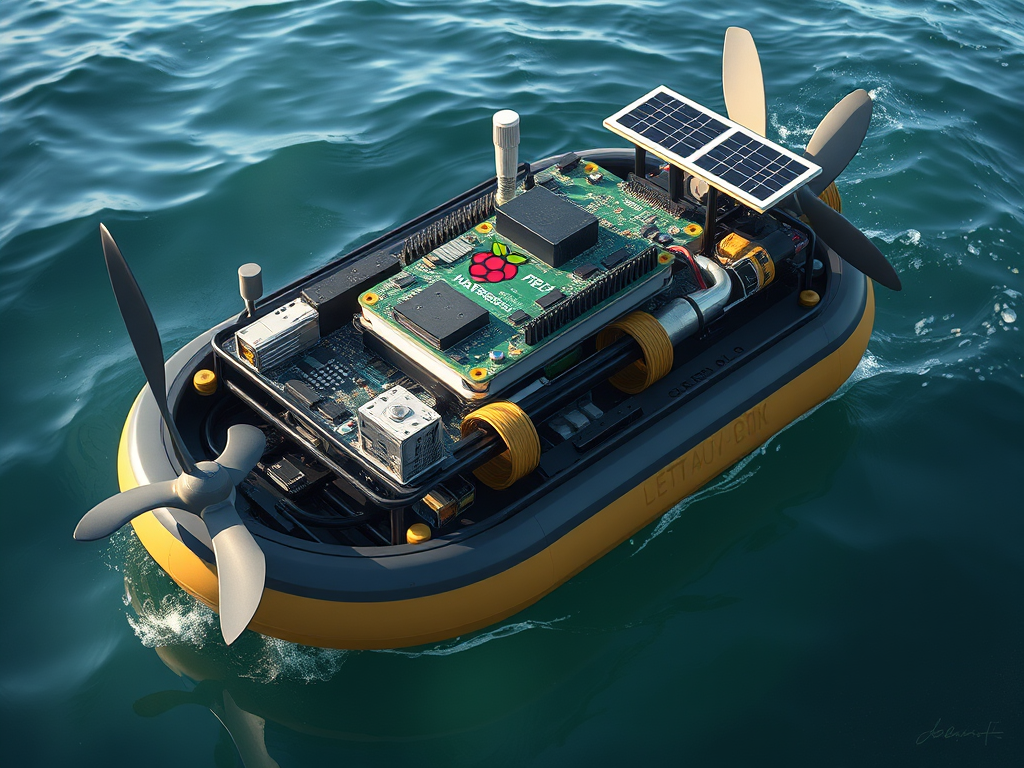
1. Raspberry Pi as the Central Processor:
- Role: Acts as the “brain” of the USV, handling all processing tasks.
- Capabilities: Runs Linux-based operating systems, supports Python and other programming languages, and is compatible with a wide range of sensors and peripherals.
- Connectivity: Offers multiple USB ports, HDMI output for debugging, and GPIO pins for direct sensor and motor connections.
2. Sensors for Navigation and Data Collection:
- GPS Module:
- Provides accurate location data for navigation.
- Can be used to set waypoints and track the USV’s path.
- IMU (Inertial Measurement Unit):
- Includes accelerometers and gyroscopes for measuring orientation and movement.
- Helps maintain stability and correct the course.
- Camera:
- Captures images and video for visual navigation or surveillance.
- Can be used with OpenCV for real-time image processing tasks like object detection.
- Ultrasonic/Depth Sensor:
- Measures distance to the waterbed or obstacles.
- Useful for avoiding collisions and navigating shallow waters.
3. Communication Systems:
- Wi-Fi Module:
- Allows for local network communication and remote control.
- Enables live data streaming and updates.
- Radio Transceiver (e.g., LoRa):
- Provides long-range communication capabilities.
- Useful for transmitting data back to a base station over kilometers.
- 4G/5G Module:
- Offers internet connectivity for real-time remote access and cloud integration.
4. Propulsion and Control:
- Motors and Propellers:
- Provide the necessary thrust to move the USV.
- Can be controlled in terms of speed and direction for precise navigation.
- ESC (Electronic Speed Controller):
- Interfaces between the Raspberry Pi and motors.
- Regulates motor speed based on control signals from the Raspberry Pi.
5. Power Management:
- Battery Pack:
- Supplies power to all electronic components.
- Capacity depends on the USV’s operational duration and power needs.
- Solar Panels (optional):
- Mounted on the USV’s surface to recharge batteries and extend mission duration.
- Useful for long-term deployments in sunny environments.
6. Software and Algorithms:
- Operating System:
- Typically a Linux-based OS like Raspbian.
- Navigation Algorithms:
- Implement waypoint navigation, obstacle avoidance, and path planning.
- Data Processing:
- Real-time data logging, processing of sensor inputs, and decision-making.
- ROS (Robot Operating System):
- Provides a framework for integrating sensors, controlling motors, and implementing complex behaviors.
7. Hull Design:
- Waterproofing:
- Ensures electronic components are protected from water ingress.
- Material:
- Typically made from lightweight, durable materials like fiberglass or reinforced plastics.
- Shape:
- Designed for stability and efficiency in water, with considerations for hydrodynamics.
This setup allows for a versatile and powerful USV capable of a wide range of applications, from environmental monitoring to surveillance.
Leave a Reply